
Endroid's local comm done. :)
Since school has ended for me last month, I started on Endroid, an experimental project for me to build a self-ware robot (project plan).
So far, the easy mechanical parts are done:
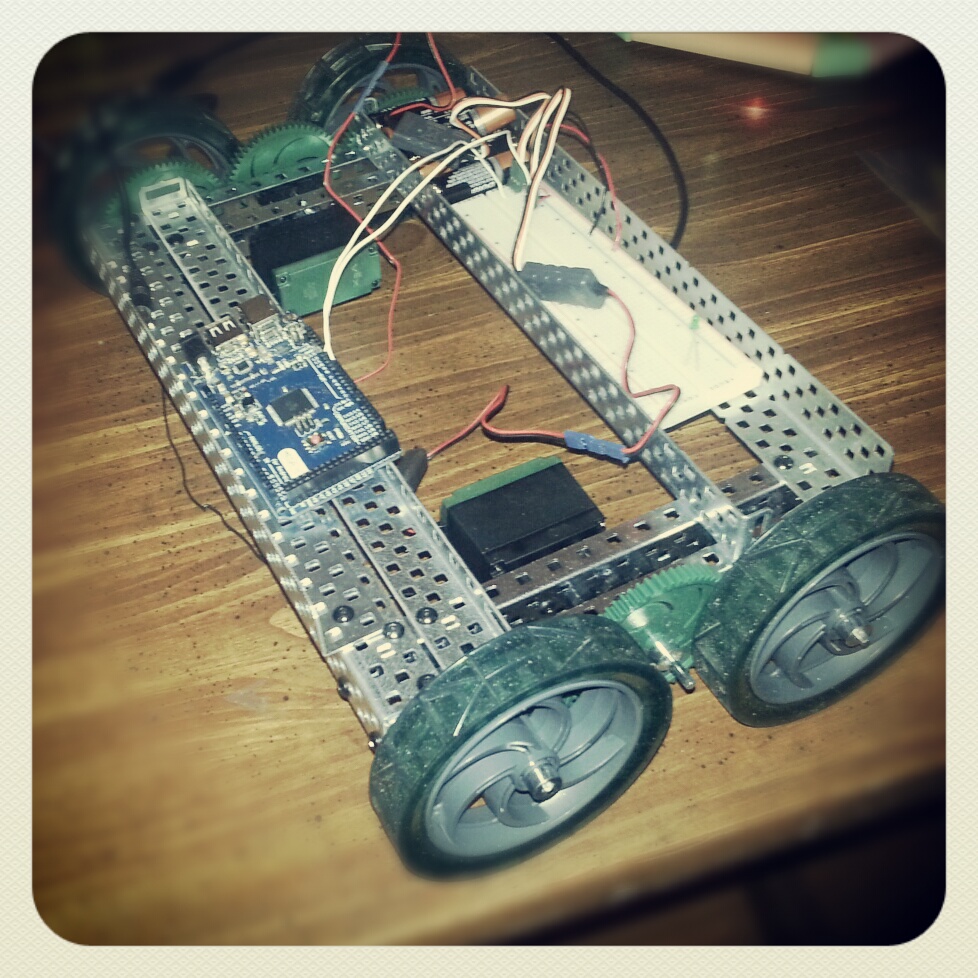
The Vex 2-wire motors can be controlled via Arduino fairly easy with Vex Microcontroller 29 which turns Arduino's PWM (pulse width modulated signals) into DC signals so you can plug them directly into the PWM analog ports and write the programs using Servo.h class.
The are only two parts that I think were tricky to me since I am a beginner in making physical toys: first is the power source, you can't power the motors using a 3V or 5V motor, so what you can do is power the motors separately using a 7.5V or 9V battery, the reason for this goes will be explained again later as well.
The second part is the value for moving forward/stop/backwards when using Servo.h in Arduino, the following values were tested:
const int MF = 20; // angle that moves motor forward
const int MB = 138; // angle that moves motor backward
const int MS = 91; // angle that stops the motor
(well, switch to #define for you code of course)
Then for the Aruidno and Android connection, you will first have to download and follow the instructions for Demokit for ADK 2.0.
A stripped down version below that allows you to control the robot moving in different directions via an Android device (3.0+) can be found below. I have omitted layout xmls and manifest since they are fairly straight forward. Credits also goes to various online sources and Stack Overflow.